PHX Toolbox: fyzika pevných těles v MATLABu
Firma HUMUSOFT uvádí věřejnou testovací verzi rozšíření pro 3D fyziku pevných těles pro MATLAB/Simulink.
PHX Toolbox obsahuje objektově orientované rozhraní postavené nad osvědčeným fyzikálním jádrem Bullet Engine, základní bloky pro Simulink, ukázkové příklady a dokumentaci.
Pomocí PHX funkcí můžete snadno a rychle sestavit fyzikální model složený z tuhých těles, kinematických vazeb, sil, pružin a dalších interakčních prvků. Připravený model je pak možné ihned simulovat a zároveň vizualizovat.
Co PHX Toolbox umí
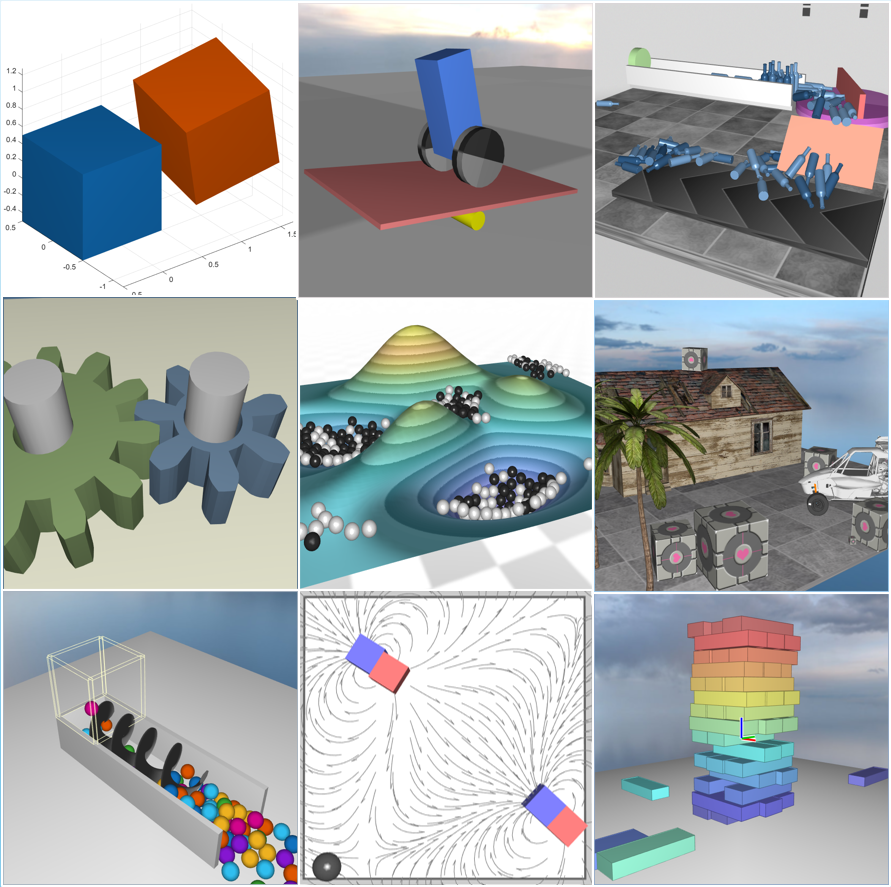
- Dynamika pevných těles ve 3D
- Kolize a kontakty mezi primitivními objekty (koule, kvádr, válec, atd.) nebo importovanými modely (ze STL/OBJ souborů)
- Klouby (rotační, sférický, ozubený a další), pružiny a lana
- Silové a polní prvky – trysky, odpor prostředí, dipólová a monopólová pole
- Nástroje pro záznam a měření – logování veličin, vykreslování trajektorií, měření vzdáleností a úhlů, interaktivní prohlížeč scény
- Blok pro Simulink pro uzavřenou souběžnou simulaci (co-simulaci)
- Simulace bez grafického výstupu pro rychlé výpočty, dávkové zpracování a složité experimenty
K čemu se PHX Toolbox hodí
PHX Toolbox cílí na úlohy, kde jsou v centru dění kontakty a mechanika pevných těles: rychlé prototypování mechanismů a robotů, výuka dynamiky a simulací, návrh a ladění řídicích algoritmů v uzavřené smyčce se Simulinkem, generování dat pro strojové učení nebo prostě jen názorné fyzikální experimenty přímo v MATLABu.
Jak začít
Nejnovější balíček PHXToolbox.mltbx stáhnete
nejjednodušeji přímo ze stránky File Exchange (viz tlačítko níže), nebo
přímo přes správce rozšíření v MATLABu.
PHX Toolbox je určený pro MATLAB 2025a nebo novější a je kompatibilní se všemi platformami (Windows, MacOS, Linux). Ke svému běhu taktéž nevyžaduje externí grafickou kartu.
Po instalaci je PHX Toolbox rovnou připraven k použití. Sadu ukázkových
skriptů phxex_* najdete v podsložce examples
(v rámci instalační složky toolboxu), průvodce prvními kroky pak v
doc/GettingStarted.mlx.
Máte dotaz, nápad na rozšíření, nebo zájem o využití nad rámec testovací verze? Napište nám na phx@humusoft.cz.
Lubor Zháňal, 1.7.2026